なぜLiDARはGoogleの自動運転車のセンサに採用されたか?
おすすめ本の本文抜粋「自動運転のためのセンサシステム入門」

書籍書影より
ACC用センサ(注釈:アダプティブ・クルーズ・コントロール(Adaptive Cruise Control)、レーダーパルスで車間距離を自動的に保つ車間自動制御)としては抜群の相性を示した電波レーダだが,自動運転用センサとして使おうとするには大きな欠点がある.それは空間解像度が低く,追従走行以外には使いづらいということである.
相対速度が容易にわかるため,高速道路では前方走行車とそれ以外からの反射物を分離することは問題なかった.ところが,空間解像度が低く物体形状を見ているわけではないので,停止車両とガードレールの区別は付かないのである.
そのため,前方停止車に対する自動ブレーキ制御,いわゆる「ぶつからない車」への適用が難しいという問題があった.また,一般道路は交通環境が複雑であるため,ACCとしての使用も難しくなり,高速道路以外で使うためには画像処理とのフュージョンなどが必要になったのである.この頃から,Googleが一般道路で自動運転の公道実験を始め,自動運転の可能性を示し始めていた.Googleが使ったセンサは電波レーダではなく,スキャニングLiDARだった.Googleのシステムは,2007年のアメリカ国防高等研究計画局(DARPA)が行ったアーバン・チャレンジで準優勝したスタンフォード大学チームの方式(図1)を適用したものである.
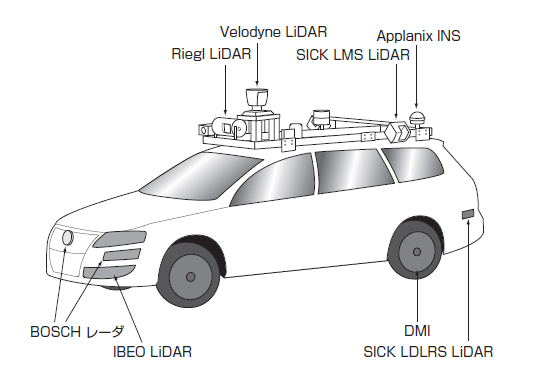
図1 スタンフォード大学の自動運転車
Googleのシステムを使うと,電波レーダでできなかった一般道路の自動運転が一気に可能になった.以降,この方式が現在までのデファクト方式となっている.
2009年,Googleは自動運転の一般道での公道実験を開始した.スタンフォード大学のアーバン・チャレンジチームが引き抜かれ,方式も何もかもそのまま継続したのである.
この方式は,Velodyne社製のHDL64EなるスキャニングLiDARを車両天井に搭載し,事前走行して得た環境のポイントクラウドデータに対して,NDTでスキャンマッチングしてSLAMを行うことが基本方式である(図2).アーバン・チャレンジと違っていたのは,使用した車両くらいのものである.
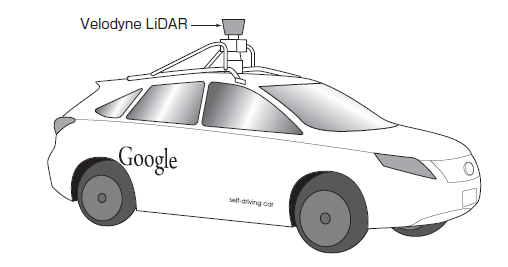
図2 Googleの自動運転車
HDL64Eは2007年のアーバン・チャレンジのために開発されたLiDARである.当時,環境が複雑で地図のない一般道を,車両を自動で走行させるためには精度の良いポイントクラウドデータが必要なことがわかっていた.そのため,車両天井から縦方向に送射する64本のレーザビームを受光素子ごと360°回転させ,自車周囲360°の環境の3D情報であるポイントクラウドデータを得るのがHDL64Eの使命だった.このLiDARがスキャンするレートは5~15Hzで,検知最大距離は100 mである.つまり,1秒間に最大15回,自車周辺360°の100 m以内のポイントクラウドデータが得られるのである.
Googleシステムは,車両天井中央に配置されるLiDARがメインセンサーである.この方式で自動運転がやりやすいのはわかったものの,普段使用する量産車で天井中央に飛び出したLiDARが市民権を得られるかどうかは意見の分かれるところだろう.
書籍紹介
自動運転のためのセンサシステム入門 車載カメラとLiDARによるセンサフュージョン
著者名:伊東 敏夫
判型:A5判
総頁数:160頁
税込み価格:2420円
今、自動車は100年に一度の大きな変革を迎えている。自動運転はその大きな流れの一つであり、自動運転に関わる技術への注目も高まっている。本書では、自動運転システムに欠かせないセンサシステム、センサフュージョンについて入門者向けに解説する。
著者紹介
伊東 敏夫(いとう としお)
1957年生まれ.1982年神戸大学工学部システム工学科卒業,同年ダイハツ工業株式会社に入社.カーエレクトロニクスの研究開発に従事.2013年同社を定年退職し,芝浦工業大学システム理工学部機械制御システム教授に就任.以来,運転支援システム研究室にて自動運転(センシング,システム,HMIなど)を研究開発中. 博士(工学)
販売サイトへ
amazon
Rakutenブックス
Yahoo!ショッピング
日刊工業新聞ブックストア
目次抜粋
第1章 自動運転に必要な環境認識センサ
運転支援システムの登場とレーザレーダ/運転支援システムの成熟と電波レーダ/自動運転の登場とLiDAR
第2章 各センサ技術の特徴
電波レーダ/レーザレーダとLiDAR/ステレオカメラ画像処理
第3章 自動運転に必要なセンシング性能
テイクオーバー実験/検出距離/空間解像度
第4章 車載カメラによる認識技術の概要
車線認識/車両認識/歩行者認識
第5章 LiDARによる認識技術の概要
車線認識/ポイントクラウドからの車両認識と歩行者認識/SLAMによる環境認識
第6章 車載カメラとLiDARによるフュージョン技術
センサフュージョンとは/複合型センサフュージョンの例/統合型センサフュージョンの例
補 章 重要事項の解説
測距手法/テンプレートマッチング/最小二乗法
↓画像をクリックしてamazonへ↓
相対速度が容易にわかるため,高速道路では前方走行車とそれ以外からの反射物を分離することは問題なかった.ところが,空間解像度が低く物体形状を見ているわけではないので,停止車両とガードレールの区別は付かないのである.
そのため,前方停止車に対する自動ブレーキ制御,いわゆる「ぶつからない車」への適用が難しいという問題があった.また,一般道路は交通環境が複雑であるため,ACCとしての使用も難しくなり,高速道路以外で使うためには画像処理とのフュージョンなどが必要になったのである.この頃から,Googleが一般道路で自動運転の公道実験を始め,自動運転の可能性を示し始めていた.Googleが使ったセンサは電波レーダではなく,スキャニングLiDARだった.Googleのシステムは,2007年のアメリカ国防高等研究計画局(DARPA)が行ったアーバン・チャレンジで準優勝したスタンフォード大学チームの方式(図1)を適用したものである.
Googleのシステムを使うと,電波レーダでできなかった一般道路の自動運転が一気に可能になった.以降,この方式が現在までのデファクト方式となっている.
2009年,Googleは自動運転の一般道での公道実験を開始した.スタンフォード大学のアーバン・チャレンジチームが引き抜かれ,方式も何もかもそのまま継続したのである.
この方式は,Velodyne社製のHDL64EなるスキャニングLiDARを車両天井に搭載し,事前走行して得た環境のポイントクラウドデータに対して,NDTでスキャンマッチングしてSLAMを行うことが基本方式である(図2).アーバン・チャレンジと違っていたのは,使用した車両くらいのものである.
HDL64Eは2007年のアーバン・チャレンジのために開発されたLiDARである.当時,環境が複雑で地図のない一般道を,車両を自動で走行させるためには精度の良いポイントクラウドデータが必要なことがわかっていた.そのため,車両天井から縦方向に送射する64本のレーザビームを受光素子ごと360°回転させ,自車周囲360°の環境の3D情報であるポイントクラウドデータを得るのがHDL64Eの使命だった.このLiDARがスキャンするレートは5~15Hzで,検知最大距離は100 mである.つまり,1秒間に最大15回,自車周辺360°の100 m以内のポイントクラウドデータが得られるのである.
Googleシステムは,車両天井中央に配置されるLiDARがメインセンサーである.この方式で自動運転がやりやすいのはわかったものの,普段使用する量産車で天井中央に飛び出したLiDARが市民権を得られるかどうかは意見の分かれるところだろう.
書籍紹介
自動運転のためのセンサシステム入門 車載カメラとLiDARによるセンサフュージョン
著者名:伊東 敏夫
判型:A5判
総頁数:160頁
税込み価格:2420円
今、自動車は100年に一度の大きな変革を迎えている。自動運転はその大きな流れの一つであり、自動運転に関わる技術への注目も高まっている。本書では、自動運転システムに欠かせないセンサシステム、センサフュージョンについて入門者向けに解説する。
著者紹介
伊東 敏夫(いとう としお)
1957年生まれ.1982年神戸大学工学部システム工学科卒業,同年ダイハツ工業株式会社に入社.カーエレクトロニクスの研究開発に従事.2013年同社を定年退職し,芝浦工業大学システム理工学部機械制御システム教授に就任.以来,運転支援システム研究室にて自動運転(センシング,システム,HMIなど)を研究開発中. 博士(工学)
販売サイトへ
amazon
Rakutenブックス
Yahoo!ショッピング
日刊工業新聞ブックストア
第1章 自動運転に必要な環境認識センサ
運転支援システムの登場とレーザレーダ/運転支援システムの成熟と電波レーダ/自動運転の登場とLiDAR
第2章 各センサ技術の特徴
電波レーダ/レーザレーダとLiDAR/ステレオカメラ画像処理
第3章 自動運転に必要なセンシング性能
テイクオーバー実験/検出距離/空間解像度
第4章 車載カメラによる認識技術の概要
車線認識/車両認識/歩行者認識
第5章 LiDARによる認識技術の概要
車線認識/ポイントクラウドからの車両認識と歩行者認識/SLAMによる環境認識
第6章 車載カメラとLiDARによるフュージョン技術
センサフュージョンとは/複合型センサフュージョンの例/統合型センサフュージョンの例
補 章 重要事項の解説
測距手法/テンプレートマッチング/最小二乗法
↓画像をクリックしてamazonへ↓
関連記事




